| ��ϸ���ܣ� ����
3DM-AHRS300A���˲ο�ϵͳ(����VG/AHRS)
3DM-AHRS300A���˲ο�ϵͳ��һ������ܡ��ͼ�λ�Ĺ��Բ����豸���������ڵ��������ƺͶ�̬��������ϵ�в�Ʒ�����ܷ���ƣ��ڶ��ӵĻ��������ܾ��ܵز����˶��������̬�Ƕȡ����ٶȡ����ٶ� ���ڲ����ÿ������˲����ж���Ϣ�ںϣ���ͨ���������֤�������ȡ�
ͼ1 3DM-AHRS300A���˲ο�ϵͳ����
һ��Ӧ�÷�Χ��
��������ơ�ƽ̨�ȶ�����ơ�ͨ�ú�����GPS ��ϡ�������̬�Ķ�̬�������ɿ���Զ��������ͼ�װ����ٵȣ�Ҳ�ʺ�ԺУ���о���λ���н�ѧ�Ϳ�ѧ�о�ʹ�á�
������Ʒ�ص㣺
1�����Լ۱ȡ����С��
2���߿ɿ��Ժ��ȶ��ԣ�
3����̬��������180����̬��������������������ϴ�ǿ���������ǣ�
4���߾���A/Dת������֤���ٶȼƷֱ��ʴﵽ0.33 mg�����ݷֱ��ʴﵽ0.007��/s��
5��ȫ�ܷ�ɿ���ƣ���֤�ڶ��ӻ����¿�������������
6�������������Ÿ�������ǿ��
7�������������ͬ���Ʒ��
��������ָ��
��1 3DM-AHRS300A����ָ��
|
����ָ��
|
�� ��
|
��λ
|
|
������ݸ�ʽ
|
��̬�ǡ������ʡ����ٶȵ�
|
|
|
������
|
>100
|
Hz
|
|
����ʱ��
|
< 1
|
sec
|
|
��
̬
��
|
������Χ
|
��180
|
degree
|
|
��̬����
|
Roll��pitch <0.3
Yaw <1 (with compass or GPS)
|
degree
|
|
��̬����
|
< 1.5
|
degree
|
|
��
��
��
|
������Χ
|
�� 350
|
��/s
|
|
�ֱ���
|
0.007
|
��/s
|
|
��ƫ�ȶ���
|
0.007
|
��/s
|
|
�������
|
2.0
|
��/��hr
|
|
�����ԣ�ȫ�¶ȣ�
|
0.1
|
%
|
|
��
��
��
��
|
������Χ
|
�� 17
|
g
|
|
�ֱ���
|
0.3
|
mg
|
|
��ƫ�ȶ���
|
0.2
|
mg
|
|
�������
|
0.2
|
m/sec/��hr
|
|
�����ԣ�ȫ�¶ȣ�
|
0.1
|
%
|
|
��
ǿ
��
|
������Χ
|
��3.5
|
gasss
|
|
�ֱ���
|
0.5
|
mgauss
|
|
��λƫ��
|
��4
|
mgauss
|
|
�������
|
1.25
|
mgauss
|
��2 3DM-AHRS300A�������ֵ
|
����ָ��
|
�� ��
|
��λ
|
|
�����ѹ
|
8.0 ~12.0
|
V
|
|
���ŵ�ѹ��Χ
|
-0.3 ~5.25
|
V
|
|
����
|
+125
|
oC
|
��3 3DM-AHRS300A��������
|
��������
|
��С
|
����
|
���
|
��λ
|
|
�����ѹ
|
8.0
|
|
12.0
|
V
|
|
�������
|
50
|
100
|
200
|
mA
|
|
����
|
1.2
|
W
|
��4 3DM-AHRS300A��������
|
��������
|
�� ��
|
�� λ
|
|
�ߴ�
|
72x72x45(��x��x��)
|
mm
|
|
����
|
140
|
gram
|
|
�涨�¶ȷ�Χ
|
+25
|
oC
|
|
�����¶ȷ�Χ
|
-40
|
|
+85
|
oC
|
|
�洢�¶ȷ�Χ
|
-50
|
|
+85
|
oC
|
�ġ��ӿ����Ŷ���
��5 3DM-AHRS300A���Ŷ���
|
�� ��
|
�� ��
|
�� ��
|

|
|
|
1
|
+VCC
|
�� ��
|
|
2
|
RX
|
RS232-RXD
|
|
3
|
TX
|
RS232-TXD
|
|
4
|
GND
|
��
|
|
5
|
Shell
|
���
|
�塢�ṹ�ߴ�
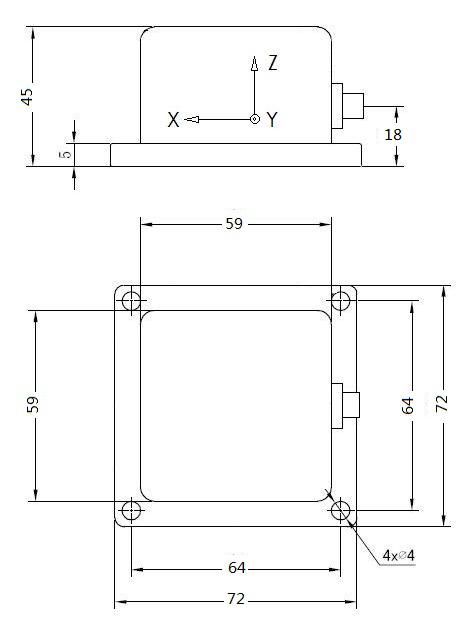
ͼ2 3DM-AHRS300A�ṹ�ߴ�
����ͨѶЭ��
7.1 ͨѶ�ӿڼ����ò���
3DM-AHRS300A���˲ο�ϵͳϵ�нӿڲ��ñ�RS232��RS485A���нӿڣ�ϵͳ�ӵ�����ڴ����������У���ͨ�����нӿ�����ͨѶ������ʱ��С��1�롣�ӿڲ����������6��
��6
|
|
|
|
������
|
115200
|
|
�����
|
8
|
|
У��λ
|
��
|
|
ֹͣλ
|
1
|
7.2 ͨѶЭ��ṹ
3DM-AHRS300A���˲ο�ϵͳ��ͨѶЭ�����ͳһ�ı��İ��ṹ��ʽ����Ч�������ݳ���Ϊ0-255�ֽڣ��ܳ���Ϊ5-260�ֽڡ���ṹ��ʽ���£�
��7
|
�ֽڶ�
|
�ֽ���
|
�� ��
|
|
PRE
|
1 �ֽ�
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1 �ֽ�
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1 �ֽ�
|
�������ࣨ���
|
|
LEN
|
1 �ֽ�
|
���ݳ���
|
|
DATA
|
0 �C 255 �ֽ�
|
����
|
|
CS
|
1 �ֽ�
|
У��λ
|
���ֽڣ���ʼ�ֽڣ�(PRE)
ÿ����Ϣ�����Ը��ֽ���Ϊ��ʼ�ֽڣ���һ���ض��ֽڣ����汾�����ֽ�Ϊ0xFA��
�豸��ַ��BID��
ÿ���ͺ��˲ο�ϵͳ��MAHRS��3DM-S10A/���е��豸��ַ���壬Ĭ��Ϊ0x01��
�������ࣨ�����MID��
���ֽڶα�ʾ���ֱ��ģ���������������7.3��
���ݳ��� (LEN)
��ʾ���ݣ�DATA���ij��ȣ�ȡֵΪ0-255�����Ϊ0����ʾ�������ֽڡ�
����(DATA)
�����а�������Ч���ݣ����ݴ�С�����ݳ��ȣ�LEN������
У��λ��CS��
���ֽڶ�Ϊһ���ֽڣ��DZ��ĵ�У���ֽڡ������ɳ��䱾���������ֽڵ����XOR������ó���
7.3 ͨѶЭ��
һ��ÿ�����İ����ض���MIDֵ���Լ��ͱ������ࣨ���MID���Ӧ�����ݳ��ȵ����ݡ�3DM-AHRS300A���˲ο�ϵͳ���������ʽ������
w ��ȫ���������ʽ��ԭʼ���ݣ���
w ��ȫ���������ʽ���������ݣ���
w ��̬�������ʽ��
w ��Ԫ�������ʽ��
w ��̬�Ǽ���Ԫ�������ʽ��
7.3.1 ���뱨�ĸ�ʽ
���뱨�����ݰ�����
AHRS0 AHRS1, AHRS2, AHRS3, AHRS4 ����
AHRS0����-��ȫ���������ʽ1(VG)���������MID=0x80���������MID=0x81��
AHRS1����-��ȫ���������ʽ2(AHRS)���������MID=0x82���������MID=0x83��
AHRS2����-��̬�������ʽ���������MID=0x84���������MID=0x85��
AHRS3����-��Ԫ�������ʽ���������MID=0x86���������MID=0x87��
AHRS4����-��̬�Ǽ���Ԫ�������ʽ���������MID=0x88���������MID=0x89��
���յ����뱨�ĺ��ͺ��˲ο�ϵͳ��MAHRS��3DM-S10A/B��������Ӧ����ִ����Ӧ����������������Ӧ������Ϣ��
���뱨��ʾ����
AHRS1 ���� �C ��ȫ���������ʽ��
������ģ�
0xFA 0x01 0x82 0x00 0x79
������ģ�
0xFA 0x01 0x82 0x40 LL LH HL HH �� �� �� �� LL LH HL HH CS
\________�������� 64�ֽڣ�________/
����ı���ǰ�����ֽں����뱨����ͬ����ʾ�豸������������4�ֽ�Ϊ���ݳ���0x40����ʾ��������64���ֽڵ���Ч���ݣ�ĩβ�ֽ�CSΪǰ�������ֽڵ����XOR����
7.3.2 ������ĸ�ʽ
�������������û���ѡ���������������ʽ��������ĸ�ʽ���8��ʾ��
��8��������ĸ�ʽ
|
�ֽڶ�
|
�ֽ���
|
�ֽں�
|
�� ��
|
|
PRE
|
1�ֽ�
|
0
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1�ֽ�
|
1
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1�ֽ�
|
2
|
�������ࣨ���
|
|
LEN
|
1�ֽ�
|
3
|
���ݳ���
|
|
Data1
|
4�ֽ�
|
4-7
|
����Data1
|
|
DataN
|
4�ֽ�
|
4N
|
����DataN
|
|
CS
|
1�ֽ�
|
4(N+1)
|
У��λ
|
3DM-AHRS300A���˲ο�ϵͳʵ����������������9����13��ʾ��
��9��AHRS0����-��ȫ���������ʽ1(VG)���������MID=0x80���������MID=0x81
|
�ֽڶ�
|
�ֽ���
|
�ֽں�
|
�� ��
|
|
PRE
|
1�ֽ�
|
0
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1�ֽ�
|
1
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1�ֽ�
|
2
|
0x80����0x81��
|
|
LEN
|
1�ֽ�
|
3
|
0x40��64�ֽڣ�
|
|
GyroX
|
4�ֽ�
|
4-7
|
X�����ݽ�����ԭʼ���� (rad/s)
|
|
GyroY
|
4�ֽ�
|
8-11
|
Y�����ݽ�����ԭʼ���� (rad/s)
|
|
GyroZ
|
4�ֽ�
|
12-15
|
Z�����ݽ�����ԭʼ���� (rad/s)
|
|
AccX
|
4�ֽ�
|
16-19
|
X����ٶȼ�ԭʼ���� (mg)
|
|
AccY
|
4�ֽ�
|
20-23
|
Y����ٶȼ�ԭʼ���� (mg)
|
|
AccZ
|
4�ֽ�
|
24-27
|
Z����ٶȼ�ԭʼ���� (mg)
|
|
MagX
|
4�ֽ�
|
28-31
|
X���ǿ��ԭʼ���� (mguass)
|
|
MagY
|
4�ֽ�
|
32-35
|
Y���ǿ��ԭʼ���� (mguass)
|
|
MagZ
|
4�ֽ�
|
36-39
|
Z���ǿ��ԭʼ���� (mguass)
|
|
Quat0
|
4�ֽ�
|
40-43
|
��Ԫ��1 W (scalar)
|
|
Quat1
|
4�ֽ�
|
44-47
|
��Ԫ��2 X
|
|
Quat2
|
4�ֽ�
|
48-51
|
��Ԫ��3 Y
|
|
Quat3
|
4�ֽ�
|
52-55
|
��Ԫ��4 Z
|
|
Roll
|
4�ֽ�
|
56-59
|
������ (deg)
|
|
Pitch
|
4�ֽ�
|
60-63
|
������(deg)
|
|
Yaw
|
4�ֽ�
|
64-67
|
���(deg)
|
|
CS
|
1�ֽ�
|
68
|
У��λ
|
��10��AHRS1����-��ȫ���������ʽ2��AHRS�����������MID=0x82���������MID=0x83
|
�ֽڶ�
|
�ֽ���
|
�ֽں�
|
�� ��
|
|
PRE
|
1�ֽ�
|
0
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1�ֽ�
|
1
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1�ֽ�
|
2
|
0x82����0x83��
|
|
LEN
|
1�ֽ�
|
3
|
0x40��64�ֽڣ�
|
|
GyroX
|
4�ֽ�
|
4-7
|
X�����ݽ�����(rad/s)
|
|
GyroY
|
4�ֽ�
|
8-11
|
Y�����ݽ�����(rad/s)
|
|
GyroZ
|
4�ֽ�
|
12-15
|
Z�����ݽ�����(rad/s)
|
|
AccX
|
4�ֽ�
|
16-19
|
X����ٶȼ�(mg)
|
|
AccY
|
4�ֽ�
|
20-23
|
Y����ٶȼ�(mg)
|
|
AccZ
|
4�ֽ�
|
24-27
|
Z����ٶȼ�(mg)
|
|
MagX
|
4�ֽ�
|
28-31
|
X���ǿ��(mguass)
|
|
MagY
|
4�ֽ�
|
32-35
|
Y���ǿ��(mguass)
|
|
MagZ
|
4�ֽ�
|
36-39
|
Z���ǿ��(mguass)
|
|
Quat0
|
4�ֽ�
|
40-43
|
��Ԫ��1 W (scalar)
|
|
Quat1
|
4�ֽ�
|
44-47
|
��Ԫ��2 X
|
|
Quat2
|
4�ֽ�
|
48-51
|
��Ԫ��3 Y
|
|
Quat3
|
4�ֽ�
|
52-55
|
��Ԫ��4 Z
|
|
Roll
|
4�ֽ�
|
56-59
|
������ (deg)
|
|
Pitch
|
4�ֽ�
|
60-63
|
������(deg)
|
|
Yaw
|
4�ֽ�
|
64-67
|
���(deg)
|
|
CS
|
1�ֽ�
|
68
|
У��λ
|
��11��AHRS2���� - ��̬�������ʽ���������MID=0x84���������MID=0x85
|
�ֽڶ�
|
�ֽ���
|
�ֽں�
|
�� ��
|
|
PRE
|
1�ֽ�
|
0
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1�ֽ�
|
1
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1�ֽ�
|
2
|
0x84����0x85��
|
|
LEN
|
1�ֽ�
|
3
|
0x0C��12�ֽڣ�
|
|
Roll
|
4�ֽ�
|
4-7
|
������ (deg)
|
|
Pitch
|
4�ֽ�
|
8-11
|
������(deg)
|
|
Yaw
|
4�ֽ�
|
12-15
|
���(deg)
|
|
CS
|
1�ֽ�
|
16
|
У��λ
|
��12��AHRS3���� -��Ԫ�������ʽ���������MID=0x86���������MID=0x87
|
�ֽڶ�
|
�ֽ���
|
�ֽں�
|
�� ��
|
|
PRE
|
1�ֽ�
|
0
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1�ֽ�
|
1
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1�ֽ�
|
2
|
0x86����0x87��
|
|
LEN
|
1�ֽ�
|
3
|
0x10��16�ֽڣ�
|
|
Quat0
|
4�ֽ�
|
4-7
|
��Ԫ��1 W (scalar)
|
|
Quat1
|
4�ֽ�
|
8-11
|
��Ԫ��2 X
|
|
Quat2
|
4�ֽ�
|
12-15
|
��Ԫ��3 Y
|
|
Quat3
|
4�ֽ�
|
16-19
|
��Ԫ��4 Z
|
|
CS
|
1�ֽ�
|
20
|
У��λ
|
��13��AHRS4����-��̬�Ǽ���Ԫ�������ʽ���������MID=0x88���������MID=0x89
|
�ֽڶ�
|
�ֽ���
|
�ֽں�
|
�� ��
|
|
PRE
|
1�ֽ�
|
0
|
���ֽڣ���ʾ����ʼ��0xFA��
|
|
BID
|
1�ֽ�
|
1
|
�豸��ַ��Ĭ�ϣ�0x01��
|
|
MID
|
1�ֽ�
|
2
|
0x88����0x89��
|
|
LEN
|
1�ֽ�
|
3
|
0x1C��28�ֽڣ�
|
|
Quat0
|
4�ֽ�
|
4-7
|
��Ԫ��1 W (scalar)
|
|
Quat1
|
4�ֽ�
|
8-11
|
��Ԫ��2 X
|
|
Quat2
|
4�ֽ�
|
12-15
|
��Ԫ��3 Y
|
|
Quat3
|
4�ֽ�
|
16-19
|
��Ԫ��4 Z
|
|
Roll
|
4�ֽ�
|
20-23
|
������ (deg)
|
|
Pitch
|
4�ֽ�
|
24-27
|
������(deg)
|
|
Yaw
|
4�ֽ�
|
28-31
|
���(deg)
|
|
CS
|
1�ֽ�
|
32
|
У��λ
|
| 




