| 详细介绍:
3DM-GD惯性导航教学实验系统简介
(惯导/航姿/运动传感)

2015.07.06
V2.0
第一部分 3DM-GD系统介绍
1 系统用途
3DM-GD惯性导航教学实验系统(惯导/航姿/运动传感),该系统标配双轴电动转台、转台控制器和一个MEMS器件的AHRS航姿参考系统,该传感器由九轴惯性测量组合,包含三轴陀螺仪、三轴加速度计、三轴磁强计传感器,能满足导航、制导与控制专业的学生了解惯性导航及飞行控制原理,有助于学生理解、熟悉、掌握惯性导航/航向姿态/运动状态采集的原理、技术及其应用,也可以满足其它专业如飞行技术、航海技术、无人机技术、测绘技术等不同专业的惯性导航技术的科研和教学的使用。还可设计开发各类飞行器、车辆、船舶、机器人、工程机械、穿戴式等各类运动载体测量及控制的创新实验。虽然我们完善了该系统的实验教学功能,同时,该系统也是一个二次开发平台,可以作为其他项目的数据采集验证平台。
2 功能特点
(1)较低的价格,可以让众多学生同时动手实验,引领国内惯导/航姿/运动传感教学和实验进入普及化时代;
(2)国内首家配备低成本电动转台,可做定量实验,更好的掌握惯导/航姿/运动传感技术;
(3)提供全面的相关教学和实验配套服务,减轻教师的负担;
(4)集成度高,包含了各类运动相关传感器;
(5)实验覆盖全面,从单一运动传感器实验到所有运动传感器融合的综合实验;
(6)通过自身在国内惯导/航姿/运动传感领域的领先技术,实现惯导/航姿/运动传感实验室方案的不断升级,真正使高校教学/实验/科研水平跟上技术发展的潮流;
(7)可为学校量身定做相关实验系统;
(8)系统集成了多种模型,能够完成各个学科,包括航天,航空,航海,陆地等载体的惯性导航实验项目;
3 实验设备

图1-1 实验设备示意图
3.1 惯导/航姿模块(3DM-E10A)
该模块是一款微型的全姿态测量传感装置,它由三轴MEMS陀螺、三轴MEMS加速度计、三轴磁阻型磁强计等三种类型的传感器构成。三轴陀螺用于测量载体三个方向的的绝对角速率,三轴加速度计用于测量载体三个方向的加速度,在系统工作中,主要作用是感知系统的水平方向的倾斜,并用于修正陀螺在俯仰和滚动方向的漂移,三轴磁阻型磁强计测量三维地磁强度,用于提供方向角的初始对准以及修正航向角漂移。可提供的输出数据有:原始数据、四元数、姿态数据等。
3.2 双轴电动转台(TT-3DM-2E-10)
机械台体采用UO形铝合金框架结构,由内环横滚轴框架和外环俯仰轴框架组成相互垂直的转动架构,采用直流电机驱动旋转,实现三维空间任意位置和角度的姿态测量。具有位置、速率和摇摆三种测试功能。技术指标如下:
|
负载尺寸重量
|
50mm×50mm×50mm / 0.5 kg
|
|
负载及夹具安装空间
|
120 mm×120mm×120mm
|
|
主轴与俯仰轴转角范围
|
连续无限
|
|
角位置综合测量精度
|
±0.08o
|
|
控制到位分辨率
|
±0.01o
|
|
速率范围
|
0.1o/s~300 o/s
|
|
速率精度与平稳度
|
1%
|
|
测角数据采集频率
|
20Hz
|
|
用户导电滑环
|
12 环/每环2A
|
|
台体重量
|
15Kg~20 Kg
|
|
测控电箱尺寸
|
300mmW×320mmW×88mmH
|
|
串口波特率
|
115200 bps
|
|
工作电源
|
220VAC/200
|
3.3 双轴采集控制器(CC-3DM-2E-10)
采集控制器通过USB或串行接口连接计算机实现航姿模块信号的采集与电动转台的测量控制。
|
测角数据采集频率
|
20Hz
|
|
外形尺寸
|
260mmW×230mmW×88mmH
|
|
串口波特率
|
115200 bps
|
|
工作电源
|
220VAC/200W
|
第二部分 实验平台相关软件介绍
1 转台控制软件
转台控制软件功能丰富,包括位置模式,速率模式,以及摇摆模式等等。能控制转台两个轴分别进行运动。可以设定转台以某一角速率旋转某一角度,也可以操纵转台持续以某一角速率旋转,也可以设定转台以某一幅角摇摆运动。
同时,考虑到实验室安装,调试的准确性,我们还增加了“置水平位”和“归位”操作,分别能够使转台旋转至初始0度位置,和垂直于水平面的位置。这一功能能够使在学生完成实验之后,统一调整转台至同一姿态,保证实验室整齐整洁。
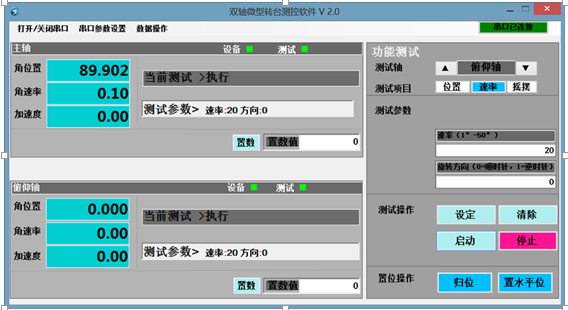
图2-1 控制软件截图
2 航姿显示实验平台
航姿显示实验平台界面简洁美观,运行高效稳定,操作简单实用。同时软件还进行了大量的数据采集操作,以固定步长收集软IMU输出的数据,并将这些数据写入文本文件和excel文件中,便于学生使用matlab和excel进行数据处理和姿态解算等等操作。
考虑到软件的实用性,软件中还可以自行设置步长以及自主选择模型,共10种实物模型和1种简单模型。包括:航空,航天,航海,陆地以及立方体模型。
在软件操作方面,学生只需要点击“写入数据文件(txt和xls)”按钮,即可将选定时间的数据保存在文件中,以备后续进行数据处理操作。这一功能不仅方便于学生进行实验。在大作业方面,学生也只需要采集一组特定的数据,将数据保存下来后,编写自己的程序进行不断的改进,而不需要一直连接转台才能进行实验。
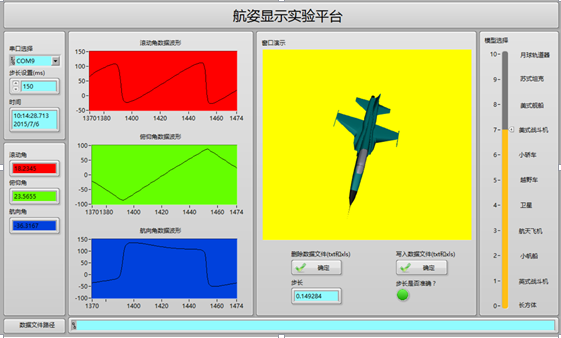
图2-3 软件截图
第三部分 实验方案介绍
转台上的IMU,能够输出以下数据:包括线加速度、角速率、磁阻、四元数和姿态角。基于这些数据的采集,我们目前设计了以下实验。目前较为完善的实验方案主要有:
|
实验编号
|
实验名称
|
|
1
|
实验系统安装和软件设置实验
|
|
2
|
AHRS及微惯性传感器认知实验
|
|
3
|
加速度计测量与结果验证实验
|
|
4
|
加速度计标度因数和零偏的测量与计算实验
|
|
5
|
陀螺静态测量与零偏计算实验
|
|
6
|
陀螺动态测量与标度因数估计实验
|
|
7
|
采用磁传感器的电子罗盘设计实验
|
|
8
|
四元数法姿态解算程序设计实验(大作业实验)
|

图3-1 实验方案设计
下面展示其中一部分实验的实验效果图:

图3-2 实验平台示意图

图3-3 部分labview源程序
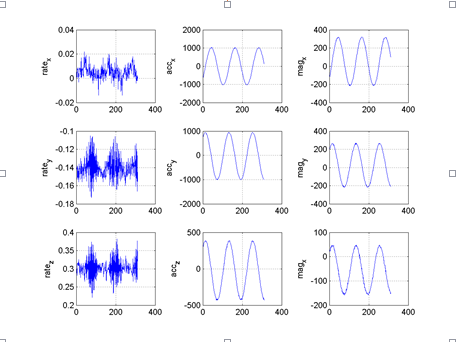
图3-4 matlab姿态解算图,角速率,加速度,磁阻数据波形显示

图3-5 matlab姿态解算图,滚转角,俯仰角,偏航角波形显示

图3-6 matlab姿态解算图,四元数波形显示
第四部分 系统配置清单
|
序号
|
名称
|
型号
|
单位
|
数量
|
|
主要器件
|
|
1
|
惯性导航教学实验
|
GD-3DM
|
套
|
|
|
配置
|
|
1
|
惯导航姿模块
|
3DM-E10A
|
个
|
1
|
|
2
|
动态倾角传感器
|
D10A
|
个
|
1
|
|
3
|
双轴电动转台
|
TT-3DM-2E-10
|
个
|
1
|
|
4
|
双轴采集控制器
|
CC-3DM-2E-10
|
个
|
1
|
|
5
|
软件光盘
|
|
张
|
1
|
|
6
|
连接线及电源线
|
|
套
|
4
|
|
7
|
教学配套实验软件
|
定制
|
套
|
8
|
|
|
整套合计
|
|
|
|
*可定制配套实验
可根据经费和实验室的大小来配置实验系统套数,效果比较好的配置是分组操作(3人一套设备),使每个学生都有条件分别独自操作完成实验。
实验室也可以分期建设,逐步配置齐全。
第五部分 附录
1.单套惯性导航教学实验设备图片

2.某高校配置的8台双轴电动转台惯导实验室图片

| 




